Inšpirácia v knihách anatómie
Trh s humanoidnými robotmi je v poslednej dobe na vzostupe. Popredné spoločnosti ako napríklad Clone Robotics či Boston Dynamics robia všetko, čo je v ich silách, aby vytvorili humanoidných robotov, ktorí sa čo najvernejšie podobajú ľuďom. Všetkých však takpovediac schoval do vačku YouTuber a mechatronický inžinier Will Cogley.
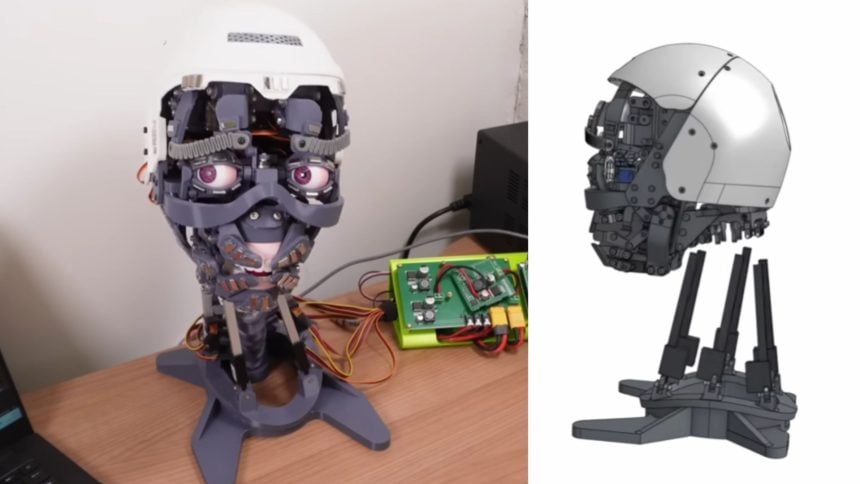
Ten sa aktívne zaujíma o animatroniku – odvetvie spájajúce animáciu a elektroniku na vytváranie takých robotických figúrok, ktoré svojím pohybom dokážu naozaj realisticky napodobniť živé bytosti. Cogley vo svojom najnovšom videu demonštroval robotický krk pripomínajúci ľudskú chrbticu, ktorý vytvoril úplne sám. Pri tvorbe sa inšpiroval ľudskou anatómiou a svalovou mechanikou.
Okrem toho je robotický krk postavený na princípe Stewartovej platformy. Jedná sa o technológiu, ktorú vo veľkom využívajú najmä v simulátoroch pohybu. Krk disponuje šiestimi maličkými lineárnymi aktuátormi slúžiacimi na spojenie hlavy s ramenami. To má za následok naozaj realistické pohyby hlavy, ktoré si možno ľahko zameniť za skutočné ľudské gestá a reakcie.
YouTuber musel kvôli svojmu vynálezu stráviť nemalé množstvo času aj nad knihami o ľudskej anatómii. Zameral sa najmä na oblasť krku, pričom si prešiel každý jeden sval či šľachu. Vo videu Cogley vysvetľuje, že usporiadanie svalov v ľudskej šiji mu pripomenuli Stewartovu platformu.
Stavce z 3D tlačiarne
Samozrejme, že cesta k finálnemu produktu nebola jednoduchá. Spočiatku sa musel vysporiadať s trhavými pohybmi, ktoré boli výsledkom snahy o realistický vzhľad, no utrpela tým ideálna geometria. Jednotlivé stavce vytlačil na 3D tlačiarni a navzájom ich spojil diskami z TPU materiálu, ktorý je dokonalou kombináciou pôsobivej pevnosti a požadovanej pružnosti.
Potom už stačilo len pár úprav na to, aby sa robotický krk pohyboval hladko a prirodzene. Zaujímavosťou je, že systém pohybu krku Cogley naprogramoval v Pythone, pričom využil algoritmy inverznej kinematiky. V praxi to vyzerá asi tak, že do programu zadá požadovanú polohu hlavy a ten mu automaticky vypočíta, ako sa musí každý lineárny aktuátor pohnúť na to, aby konkrétnu polohu dosiahol.
O všetko ovládanie sa starajú dve vlastné dosky plošných spojov – jedna zabezpečuje potrebné napätia pre rôzne časti systému, druhá zas komunikáciu a riadenie motorov.
Čo sa Cogleyho týka, tak toto vôbec nie je jeho prvý projekt. Vo svojich minulých demonštráciách predviedol napríklad animatronické oči. Každá z buliev sa dokázala otáčať ľubovoľným smerom a každé viečko samostatne žmurkať. V roku 2024 predstavil hlavu s realistickou silikónovou pokožkou, ktorú kompletne celú vytlačil na 3D tlačiarni. Hlava dokázala zdvíhať obočie, precízne pohybovať perami či jazykom. Je teda len otázkou času, kedy Will Cogley skompletizuje celého svojho robota.