Neefektívne a nedostatočne obratné
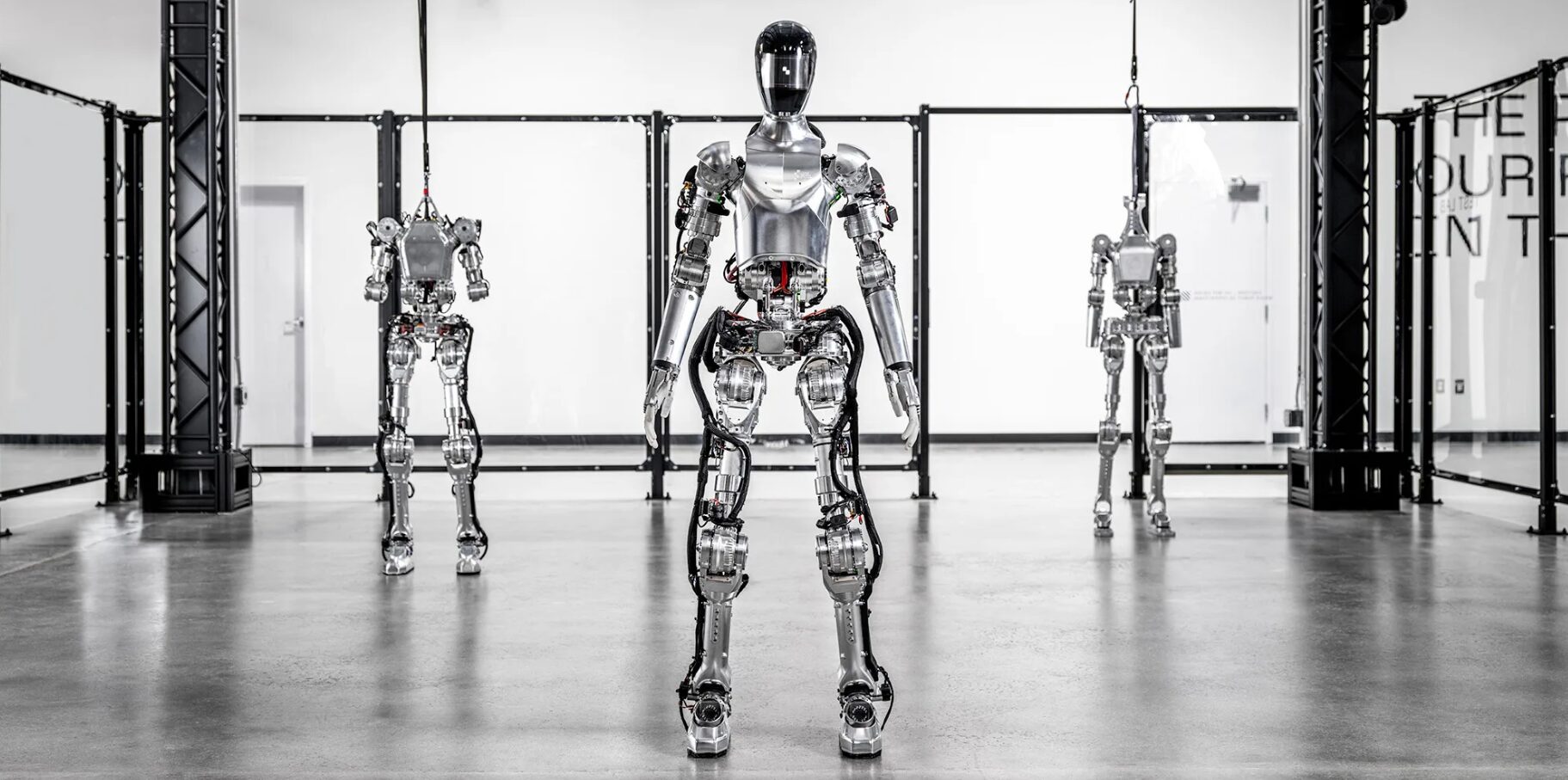
Oblasť humanoidných robotov neprestáva ohurovať rôznymi videami, v ktorých sa robot zaoberá bežnou ľudskou činnosťou. V skutočnosti ale majú tieto zariadenia zásadný problém. Najväčšou brzdou vývoja totiž nie je softvér umelej inteligencie, ale samotné fyzické telo robotov, upozorňuje ScienceAlert.
Dnešné humanoidné stroje sú vo svojej podstate rigidné konštrukcie z kovov a motorov, ktorých kĺby majú len obmedzený rozsah pohybu. Výsledkom je neprirodzená mechanika tela, ktorá si vyžaduje obrovské množstvo energie. Napríklad Tesla Optimus spotrebuje pri obyčajnej chôdzi približne 500 wattov za sekundu, zatiaľ čo človek zvládne rýchlejšiu chôdzu s energetickým výdajom okolo 310 wattov.
Hlavným dôvodom je prístup nazývaný „mozog na prvom mieste“. Väčšina robotov je navrhnutá tak, aby centrálny počítač riadil každý detail pohybu. Ľudské telo funguje úplne inak. Pohyb človeka je výsledkom komplexnej spolupráce kĺbov, šliach a svalov, ktoré prirodzene tlmia nárazy a ukladajú energiu. Vďaka tomu sa človek pohybuje efektívne a s minimálnou spotrebou. Humanoidný robot, ktorý nedisponuje podobnou telesnou „pasívnou inteligenciou“, musí vykonávať milióny korekcií za sekundu, len aby udržal rovnováhu.
Inšpiráciou je príroda
Problém dobre ilustruje aj oblasť jemnej motoriky. Zatiaľ čo človek dokáže poskladať tričko bez priamej kontroly zraku, pretože využíva hmat a schopnosť prstov prispôsobiť sa tvaru látky, robot Optimus sa pri demonštrácii musel spoliehať na komplexné výpočty a presné vizuálne dáta. Ak by bolo tričko pokrčené, robot by pravdepodobne zlyhal. Chýba mu totiž fyzická inteligencia v rukách a prstoch, ktorá je u ľudí prirodzená.
Výskumníci preto čoraz viac hovoria o koncepte mechanickej inteligencie. Tá vychádza z princípu morfologickej výpočtovej schopnosti, ktorú príroda zdokonaľovala milióny rokov. Ide o schopnosť tela automaticky reagovať na prostredie bez potreby výpočtov alebo dodatočnej energie.
Príkladom je šiška, ktorá sa mechanicky otvára a zatvára v závislosti od vlhkosti vzduchu, alebo šľachy zajaca, ktoré fungujú ako pružiny – absorbujú nárazy a uvoľňujú energiu pri behu.
Ak by sa tieto vlastnosti podarilo preniesť do robotických tiel, takéto zariadenia by nepotrebovali neustále masívne výpočty a mohli by fungovať podstatne efektívnejšie. Výskumné tímy už pracujú na kĺboch, ktoré spájajú presnosť pevných spojov s pružnosťou biologických kĺbov, alebo na konštrukciách inšpirovaných šľachami geparda, ktoré zvyšujú energetickú účinnosť pohybu.